

いよいよモデリングも大詰め。
Toonとスフィアは楽しみながらすぐ終わった。
よーし、いよいよ配布準備、かっ?!
ガクガクするぉ
ひざがガクガクするぉーーーーーー!
使用モーション
最初検索ワードが悪くて情報が見つけられず、素敵モデルを参考に独自にいじり倒す。
- 変形階層を全部0にする
- (PMXデータの状態検証で何も問題はないのに)ボーンの順番を変える
- 「左腰キャンセル」を「腰キャンセル左」に名称変更(おそらく意味はない)
- 表示先設定欄を素敵モデルと同じ設定にする(数値は変更しない)
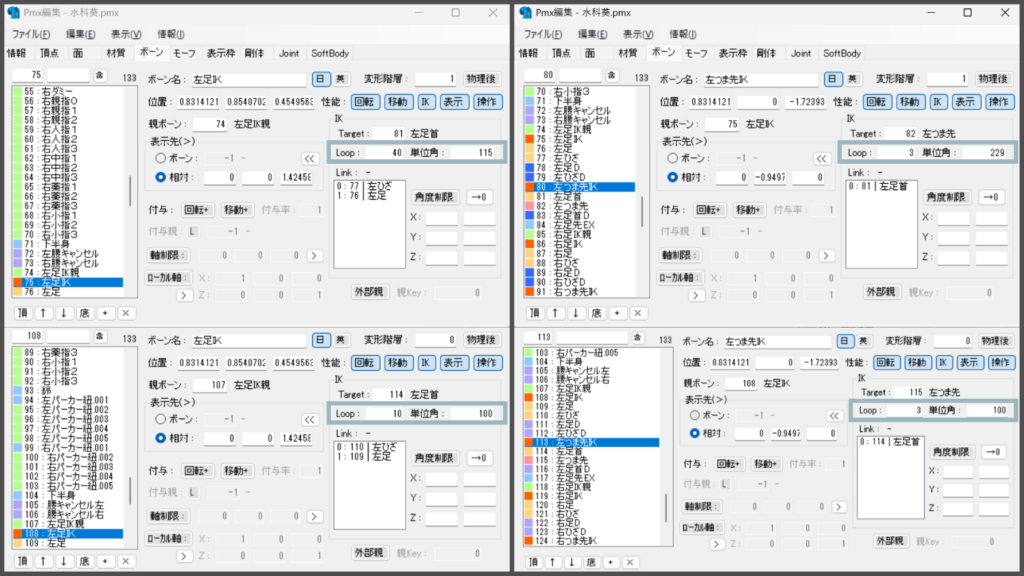
- 「足IK」と「つま先IK」のIK設定欄の「Loop」と「単位角」を素敵モデルと同じにする
最後のIKの設定欄によってガクガクがほぼおさまったので、更に数値を突き詰めて最終的に下図のようになった

その後検索ワードを見直し、再度検索をかけると記事情報が少し出てきた。
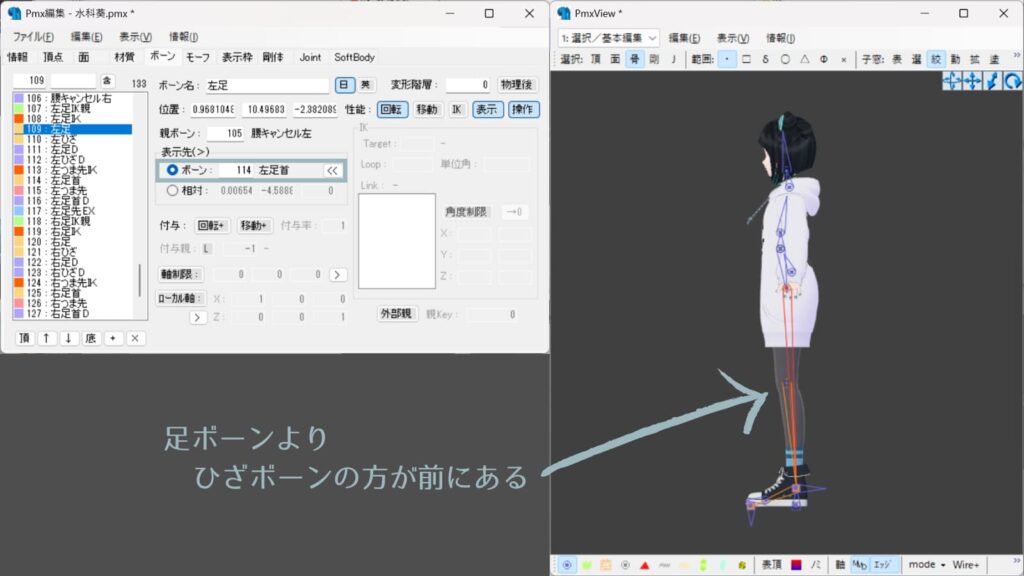
なるほど、ひざのカクつきには「ひざの角度制限」と「ひざボーンの位置」が関係していると。
みずしーの場合、足・ひざ・足首の角度は180度以上に開いていないので大丈夫だと思うが、念のためやってみる
うん、大丈夫。
それでも多少のカクつきがあるのは「足IKのクセ」にあるのかもしれないと思い、「(5)まだあったのよ冴えたやりかた」記事内の方法を試してみる。
みずしーの場合、逆ハの字よりだろうか。
ブロマガ記事内の画像には「全て初期化」・説明文には「姿勢の初期化」と書いてあってどちらが正解かわからないが、今回は「全て初期化」でやってみようと思う。
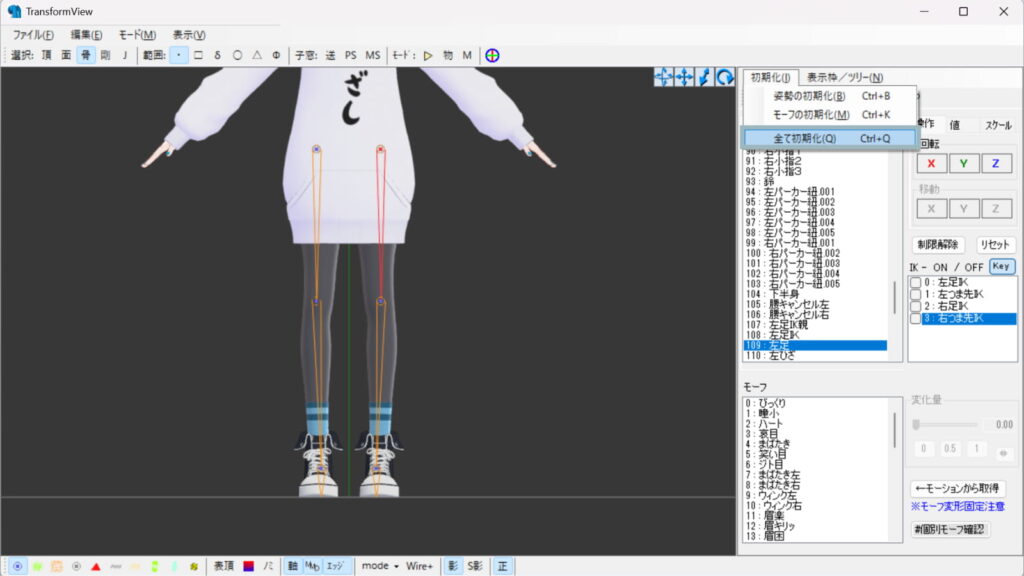
左足を選んでZ軸に1.5回転させてみた
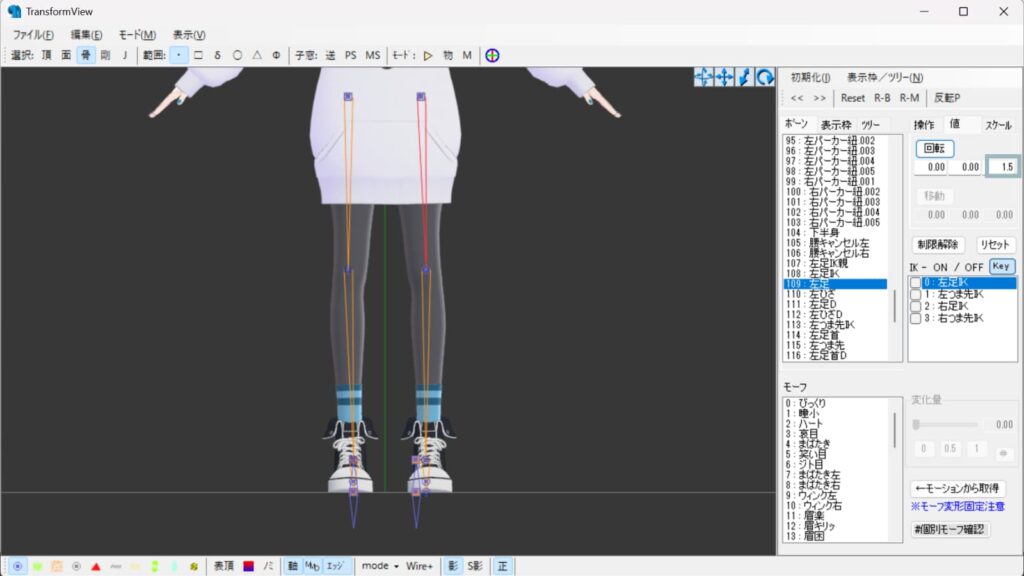
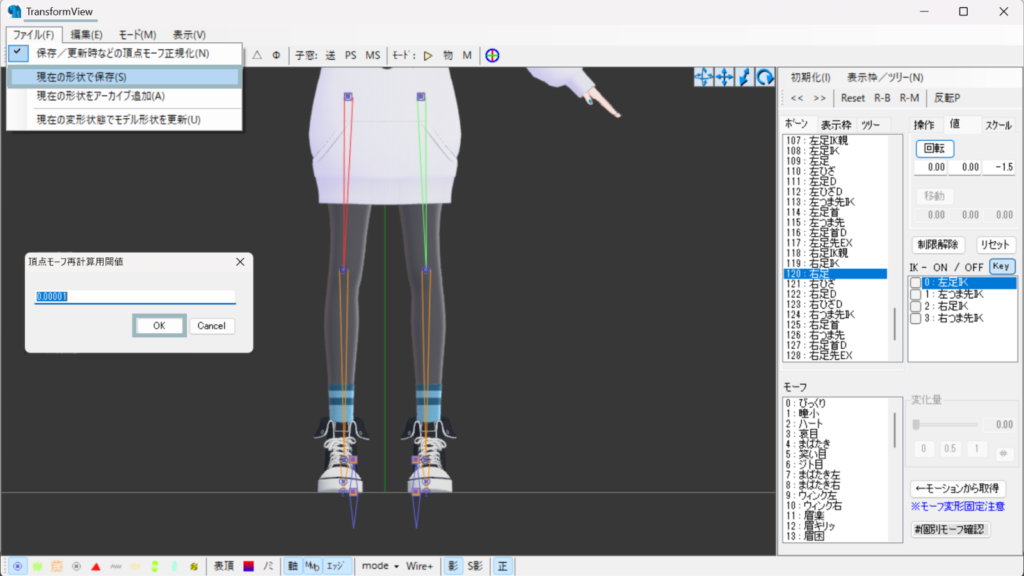
右足も同じく設定して「TransformView画面のファイル」>「現在の形状で保存」。
「頂点モーフ再計算用闘値」というパネルが出てきた。
とりあえずそのままOKして別名で保存
MMDで確認してみるとあまり変わりはなかった。
きっと許容範囲でしょう。
これでオッケーにするっっ!
次回、ついに・・・?


ー コメント ー